課程(chéng)簡(jiǎn)介
本節(jié)課(kè)學生(shēng)瞭解田徑競技的基本(běn)方(fāng)式,學(xué)習電機的(de)運(yùn)行原理(lǐ)和操控(kòng)方法,瞭解光的反射原理,然後運用巡線傳感器分別完成二路巡線、顏色傳感器巡線和三路巡線(xiàn)編程,實(shí)現田徑競技巡(xún)線,並對比(bǐ)這三種巡線(xiàn)方式的差異。
課程目標
1. 知識與技能
①學生掌握(wò)萬(wàn)奇機(jī)器人左、右電(diàn)機的運行原理和操控方(fāng)法(fǎ);
②學生能(néng)夠(gòu)分別運用 1 號(hào)和 5 號巡線傳(chuán)感器,3 號顏色(sè)巡線(xiàn)傳感器(qì),2 號、3 號和 4 號(hào)巡線傳(chuán)感器完成巡(xún)線(xiàn)任(rèn)務;
③學生能夠分析和(hé)對(duì)比(bǐ)三種巡線方式的差(chà)異,掌握多種解決(jué)問(wèn)題的方(fāng)式。
2. 過(guò)程與方法
①通過自(zì)主探究左、右輪電機的轉動方式,記錄並(bìng)總結出(chū)相(xiāng)關規律,理解萬(wàn)奇機器人左(zuǒ)、右輪電(diàn)機的編程操控方法;
②通過教師講解,學習影響反射光大小的因素及原理(lǐ),理(lǐ)解巡線的基(jī)本原理,根據巡線傳感器的位置(zhì)及數量不(bù)同,分析三種(zhǒng)不同的巡線(xiàn)方式。
③掌握三(sān)種巡線任務的(de)方法,嘗試分析、對(duì)比其差異,並進行總結。
3. 情(qíng)感態度(dù)與價值觀(guān)
①體(tǐ)驗萬奇機器人的(de)新型(xíng)運動(dòng)方式(巡線),激發學(xué)生的探索(suǒ)慾望;
②在自主探索(suǒ)不同(tóng)方式(shì)的巡線過程中,鍛鍊(liàn)分析和解決問(wèn)題的能力,並感(gǎn)受成(chéng)功的喜悅。
教學重難點
1. 教學重點(diǎn):
①學(xué)習(xí)影響反射(shè)光的因素及原理,理解萬奇機(jī)器人巡線的基本原理;
②能夠根據萬奇機器(qì)人左(zuǒ)、右輪電(diàn)機的運動方式和巡線原理,完成三種(zhǒng)巡線(xiàn)方(fāng)式的程序編寫。
2. 教(jiào)學難點(diǎn):
①能夠理解(jiě)萬奇機器人巡線中不同情況下左、右輪(lún)電機的運(yùn)動狀態;
②能夠理解三種巡線(xiàn)方式的原理。
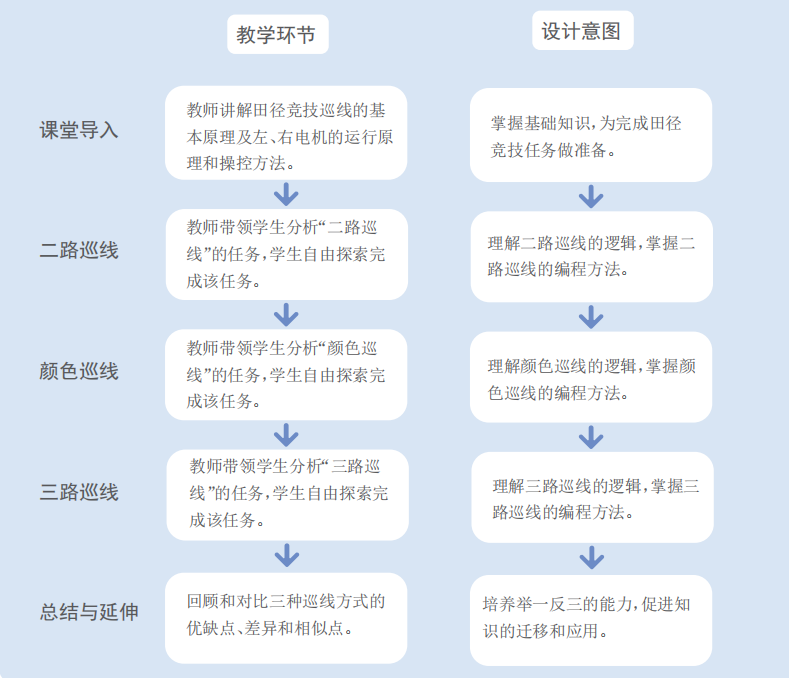
教(jiào)學流程